구조물 모니터링을 위한 RTK GPS의 아웃라이어 검출방법
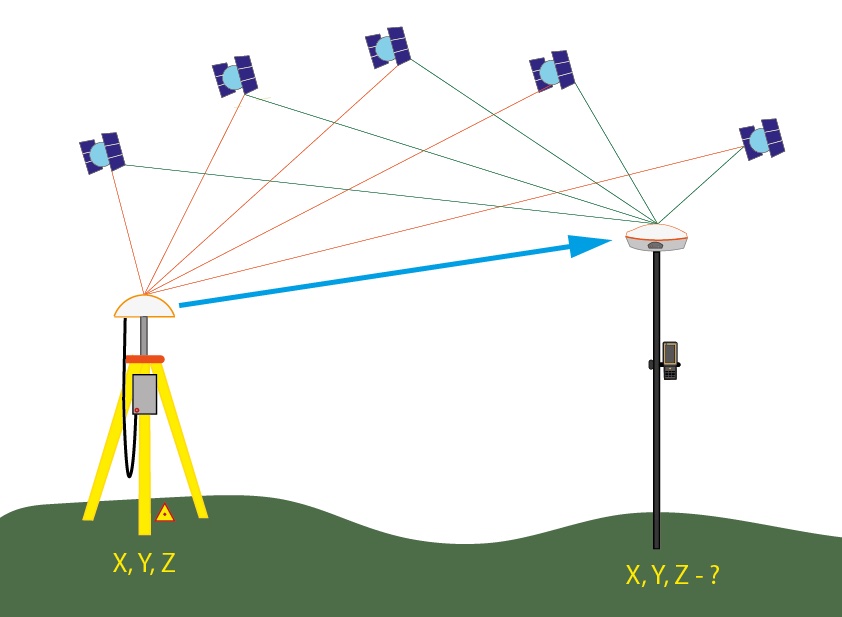
RTK GPS는 mm 단위의 정밀도로 위치를 측정할 수 있어 구조물 모니터링, 지반 침하 측정, 댐 안전 관리 등에 널리 활용됩니다. 하지만 실제 현장에서 수집된 데이터에는 다양한 원인으로 인한 아웃라이어(이상치)가 포함되어 있어, 정확한 변위 분석을 위해서는 체계적인 데이터 정제가 필수적입니다. 이 글에서는 고정된 로버를 이용한 구조물 모니터링에 특화된 아웃라이어 검출 방법을 소개합니다. RTK GPS 데이터의 특성과