Jetson Nano, PCA9685, L298N, DC-Motor 4륜구동 자동차

Jetson Nano를 충동적으로 구입하고 (http://practical.kr/?p=125) 테스트를 해본 후 뭘 만들까 고민을 하다가 자동차를 만들어 볼까? 생각을 했다. 전년도에 라즈베리파이를 이용해서 자동차를 만들려고 구매해 두었던 4륜 자동차 바디가 그대로 있어서 여기에 젯슨나노를 얹어 보기로 했다.
실패한이유
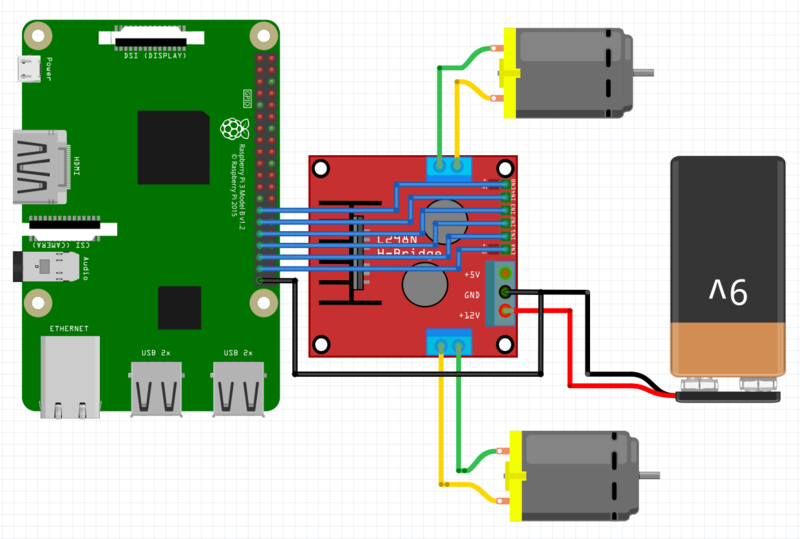
근데 생각해 보니 그때 라즈베리 기반의 자동차를 만들다 그만둔 이유가 라즈베리파이의 Digital I/O 의 숫자가 부족하다는걸 알고 나서였다. 바퀴하나를 구동하려면 모터드라이브 컨트롤러를 써야하는데 주로 L298N을 많이 사용한다. 대략 아래와 같은 연결로 모터 두개를 움직일 수 있다.
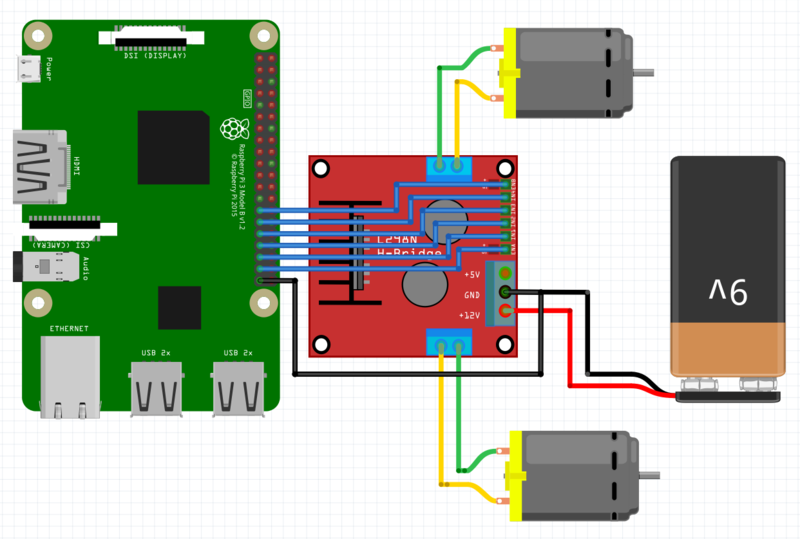
전원부를 제외하고 모터 4개를 구동하려면 12개의 DIO를 사용해야 한다. 라즈베리에서 IO를 모두 끌어쓰면 대충 맞긴한데 이러면 다른 작업을 전혀 할 수가 없다. 그래서 주로 2륜 구동으로 자동차를 만드는게 아닌가 하는 생각을 하고 바퀴를 새로 사기가 싫어서 그냥 그만 두고 말았다.
PCA9685
이렇게 생겼다
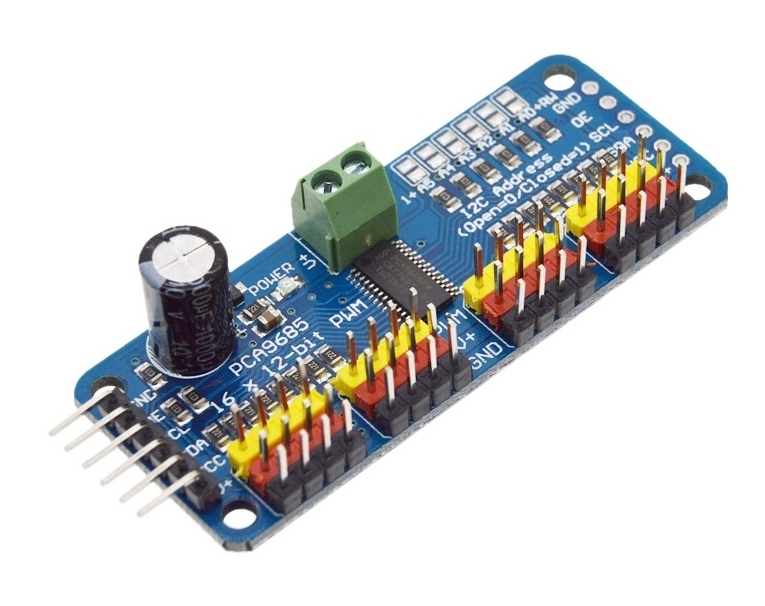
그래도 젯슨은 뭔가 좀 다르겠지 싶었지만 라즈베리와 젯슨나노의 IO Pin 구조는 거의(?) 동일하다. 그런데 스터디중 Nvidia – Jetbot 에서는 PCA9685 라는 컨트롤러를 쓰고 있었다. 젯슨과 I2C로 통신을 하고 16개의 dio 채널을 가진 PWM 컨트롤러 였다. 대략 아래의 그림과 같이 문어발(?)을 만들 수 있다.
https://cdn-shop.adafruit.com/datasheets/PCA9685.pdf
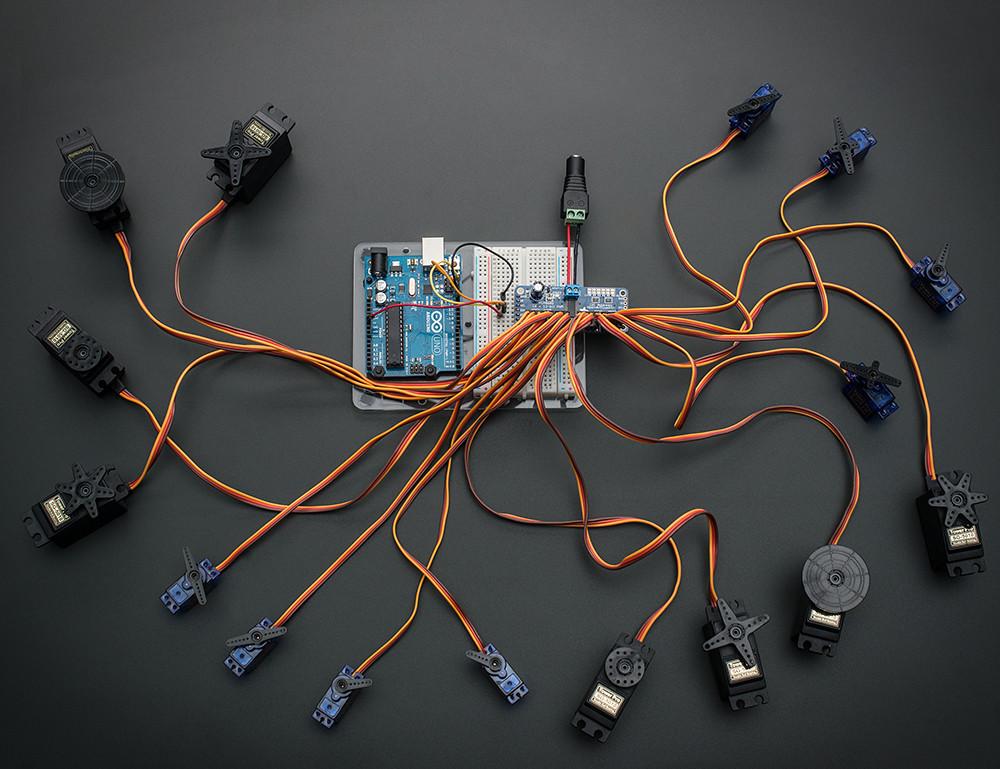
이걸 활용하면 젯슨나노에서는 4핀의 I2C 입출력 만으로 4개의 모터를 구동할 수 있고 나머지핀들은 다른용도로 활용할 수도 있다. 택배비 포함해서 2개에 만원정도니까 비싸지도 않다.
검색을 해보면 주로 서보모터를 운용할때 사용하는데 DC모터를 제대로 컨트롤 하려면 아래 그림과 같이 L298N과 함께 연결해줘야 한다.
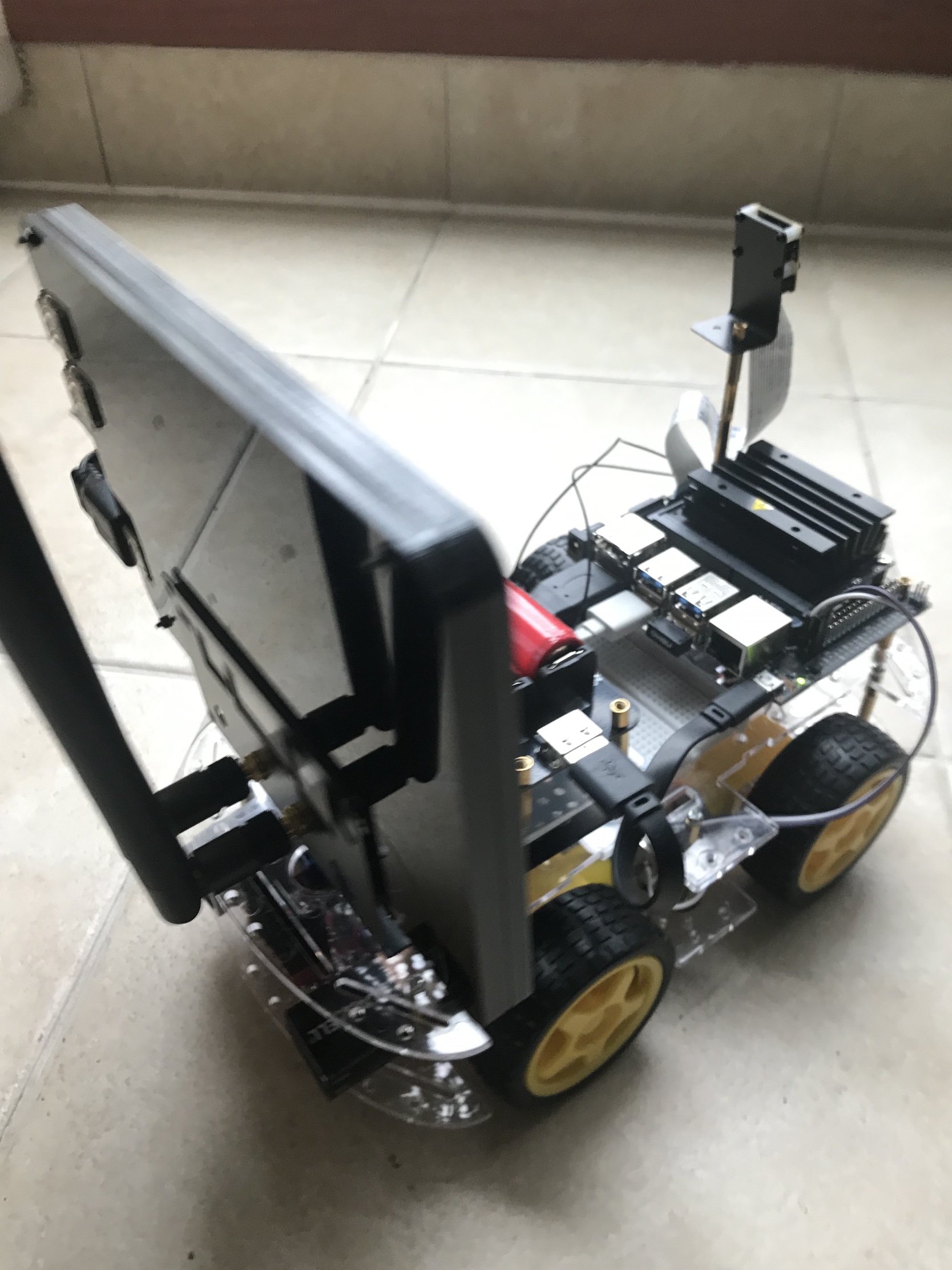
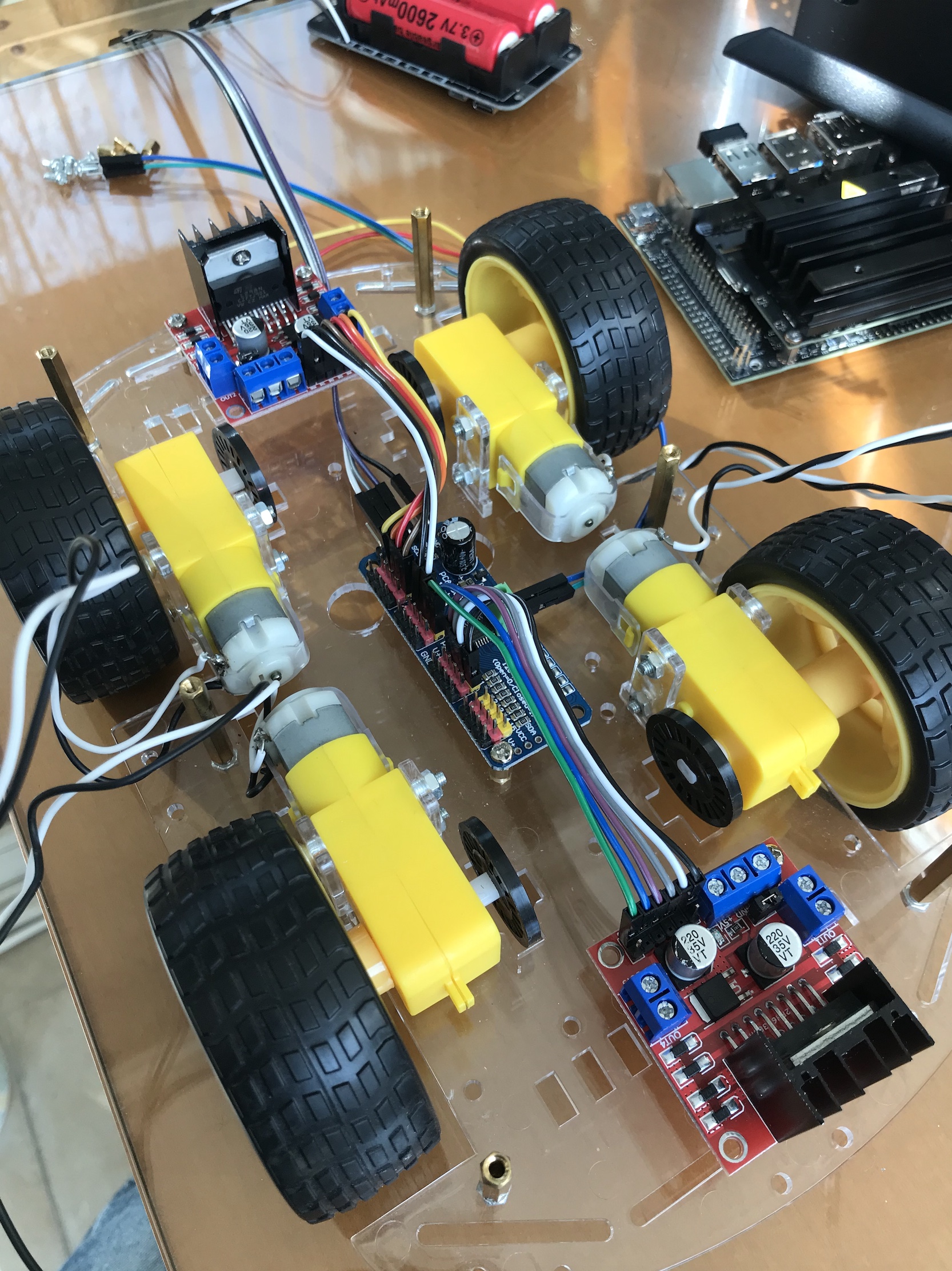
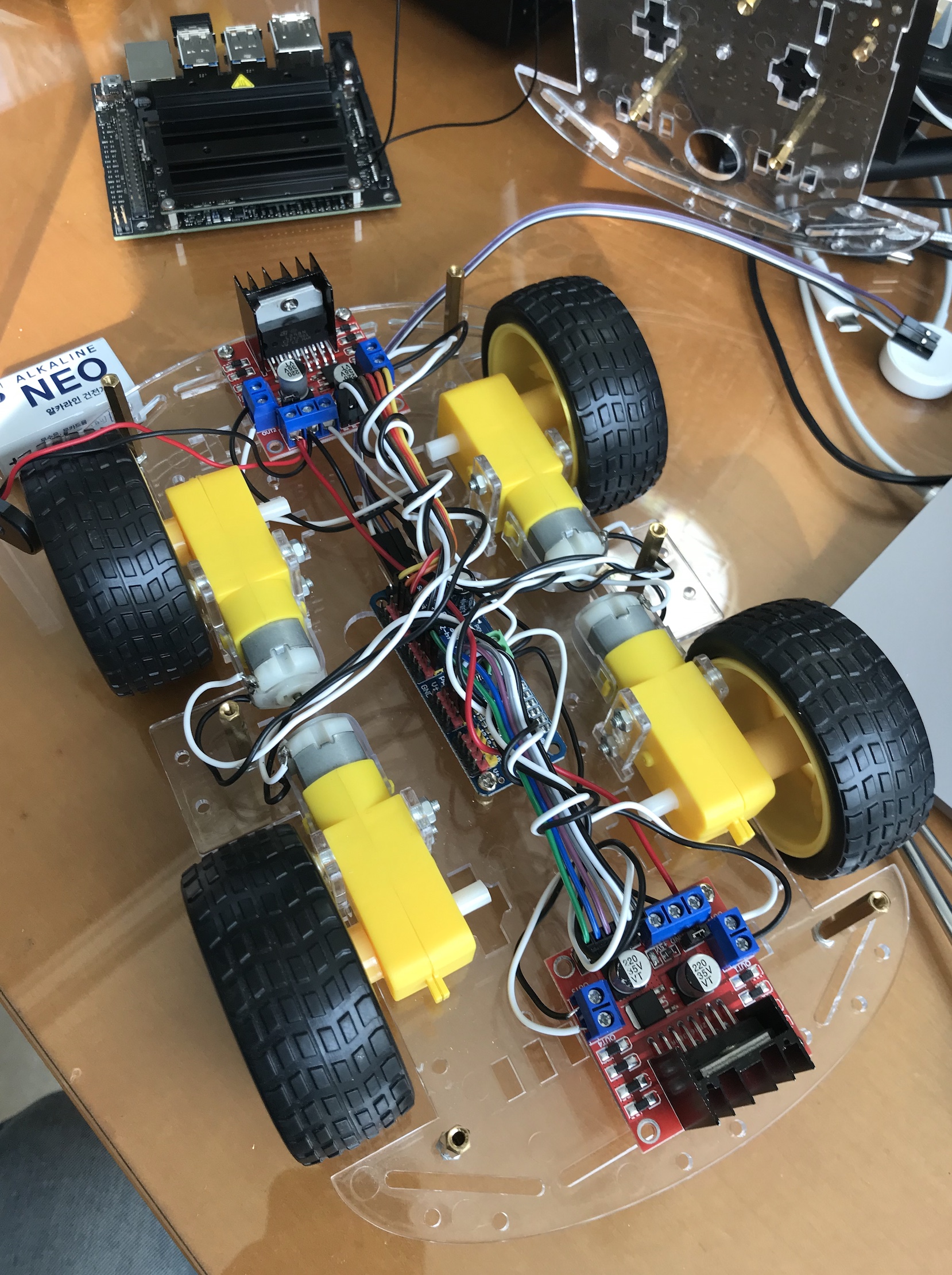
자동차의 하체
하체의 중간에 PCA9685를 놓고 앞뒤로 L298N 모터 컨트롤러를 연결했다.모터 구동을 위한 별도의 전원은 9V 건전지를 사용했는데 조립중 테스트에서는 별 문제 없이 바퀴가 잘 돌았는데 다 조립하고 중량이 무거워지니 전후진이 안되었다. 그래서 9V 건전지 두개를 병렬로 연결했다. 움직이긴 하는데 힘이 없었다. 역시 전기 자동차는 배터리가 중요하다. 한개 더 달던지 해야 한다.
차체조립
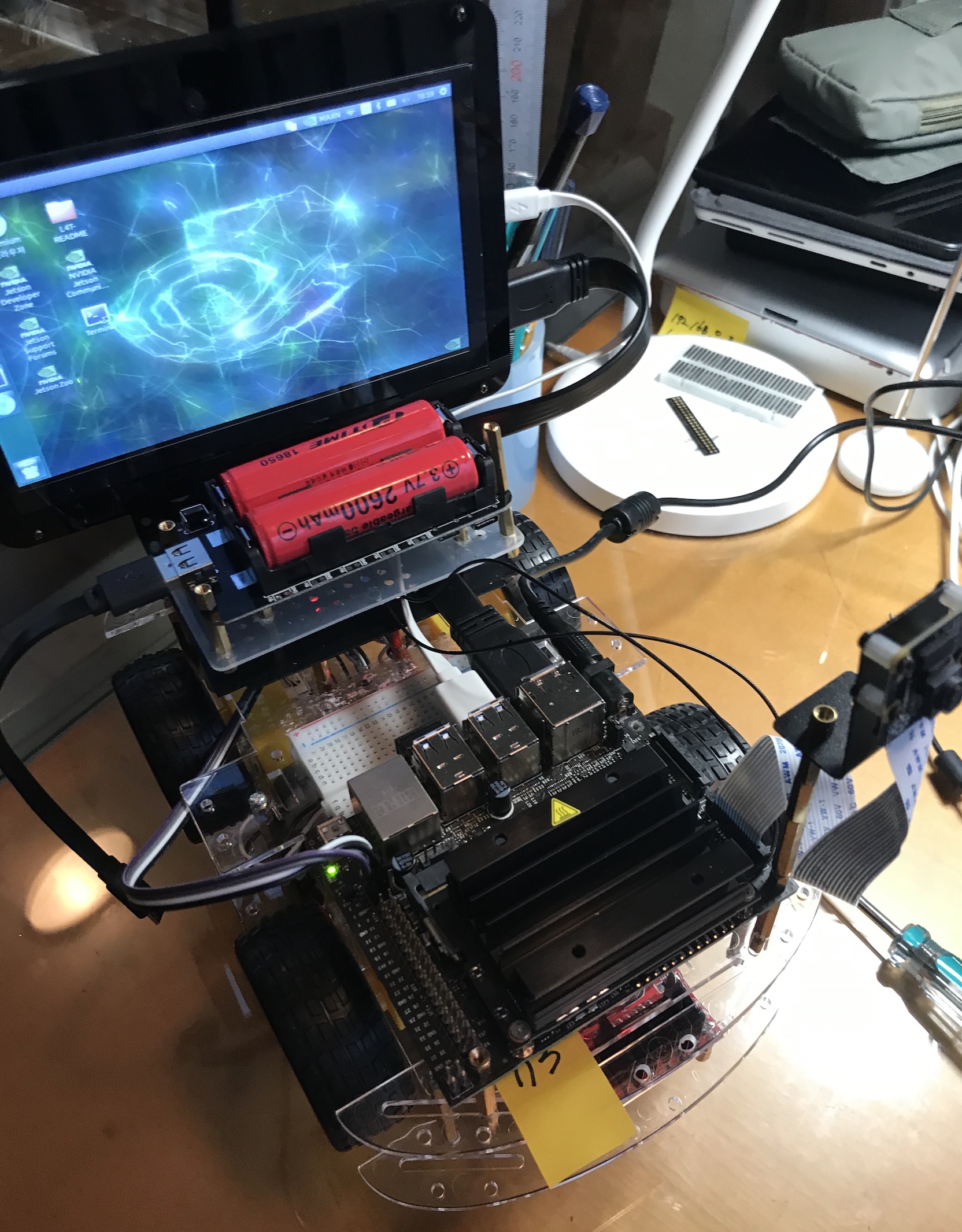
짧은 목표가 조립 & 이동 이었기 때문에 가지고 있던 이런저런 부품들을 모아 모아 모니터, 젯슨나노 & 모니터 전원을 위한 충전 배터리 향후 사용할 카메라까지 조립을 했다.
소프트웨어
검색을 해보니 PCA9685를 활용하는 대부분의 셈플들이 서보모터 구동용이라 찾기가 쉽지는 않았는데 다행히 원래 보드 제작사에서 만든 파이썬용 라이브러리가 있었다. 링크참조
https://github.com/adafruit/Adafruit_CircuitPython_Motor
https://cdn-learn.adafruit.com/downloads/pdf/adafruit-16-channel-servo-driver-with-raspberry-pi.pdf
위 라이브러리를 기반으로 아래와 같은 코드를 만들어 자동차를 움직여 봤다. 잘 움직인다.
import time
import busio
from board import SCL, SDA
from adafruit_pca9685 import PCA9685
from adafruit_motor import motor
i2c = busio.I2C(SCL, SDA)
pca = PCA9685(i2c, address=0x40)
pca.frequency = 100
pca.channels[0].duty_cycle = 0xFFFF
pca.channels[5].duty_cycle = 0xFFFF
pca.channels[6].duty_cycle = 0xFFFF
pca.channels[11].duty_cycle = 0xFFFF
motor1 = motor.DCMotor(pca.channels[1], pca.channels[2])
motor2 = motor.DCMotor(pca.channels[3], pca.channels[4])
motor3 = motor.DCMotor(pca.channels[8], pca.channels[7])
motor4 = motor.DCMotor(pca.channels[10], pca.channels[9])
print("Forwards slow")
motor1.throttle = 0.5
motor2.throttle = 0.5
motor3.throttle = 0.5
motor4.throttle = 0.5
time.sleep(3)
print("Forwards")
motor1.throttle = 1
motor2.throttle = 1
motor3.throttle = 1
motor4.throttle = 1
time.sleep(3)
print("Backwards")
motor1.throttle = -1
motor2.throttle = -1
motor3.throttle = -1
motor4.throttle = -1
time.sleep(3)
print("Backwards slow")
motor1.throttle = -0.5
motor2.throttle = -0.5
motor3.throttle = -0.5
motor4.throttle = -0.5
time.sleep(3)
print("Stop")
motor1.throttle = 0
motor2.throttle = 0
motor3.throttle = 0
motor4.throttle = 0
time.sleep(3)
print("Spin freely")
motor1.throttle = None
motor2.throttle = None
motor3.throttle = None
motor4.throttle = None
pca.deinit()
위 소스와 키입력으로 전, 후, 좌, 우로 이동하는 소스를 아래 링크에 공유 했다.
https://github.com/bipark/jetson-nano-car
실제 젯슨 나노의 GPU를 기반으로 자동차와 함께 할 수 있는 일들이 많을것 같은데 그건 다음에 해보기로 하고 오늘은 여기까지…